「Bex2」は、川崎重工業株式会社で開発が進められている四脚歩行ロボットです。当社がV-Sidoで技術協力をした四脚ロボット「RHP Bex」の後継機にあたり、この「Bex2」でも、歩行動作の生成などでV-Sidoを採用していただきました。
Bex2
川崎重工株式会社様
「Bex2」は「RHP Bex」より小型になっており、構造の工夫により、非常に多くの歩行バリエーションを実現できると期待されています。「Bex2」の全身は各所に3Dプリント品を活用して軽量化を図り、ジャンプやギャロップもできるほどの運動性能を兼ね備え、可動範囲が広く、腿関節は無限回転が可能な構造となっています。「Bex2」の胴体上にはセンサーやアームなどさまざまなアタッチメントを搭載することも可能です。
V-Sidoは、「Bex2」の歩行動作を生成するほか、コントローラなどを使った遠隔操作を可能にしています。歩行動作については、V-Sidoにより、低重心歩行、常歩、トロット歩行、襲歩風歩行、泳ぎ風歩行など、さまざまな歩行パターンを想定しています。
Bex2の特徴
-
- 全身12個のブラシレスモータによる高速な駆動
- 広い可動範囲による前膝・後膝の切り替え
- 無限回転可能な大腿関節
- 3Dプリント部品をベースとした軽量なフレーム構造
Bex2の仕様
-
- サイズ:高さ1000mm
- 軸数:12軸
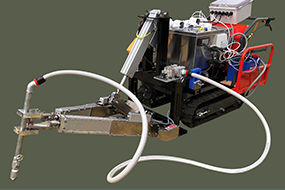
「Bex2」の外観


ICRA2024での様子
関連リンク
サイズ
高さ約1000mm
名称
Bex2